Create Your Own MoveIt Config
This guide shows a procedure to create a minimal MoveIt configuration package to move your FANUC robot with fanuc_driver.
Note
This guide uses the following names. Replace them with ones for your robot system.
Robot model: R-1000iA/100F
robot_model: r1000ia_100f (URDF’s name: r1000ia_100f.urdf.xacro)
robot_series: r1000ia (central part of the description package’s name: fanuc_r1000ia_description)
MoveIt config package name: fanuc_r1000ia_moveit_config
MoveIt Setup Assistant
Follow the official MoveIt Setup Assistant Tutorial.
Select a xacro file in the robot directory (ex.
fanuc_r1000ia_description/robot/r1000ia_100f.urdf.xacro) as the URDF file to load as the Start Screen.Create a kinematic chain from base_link to flange as the planning group.
Just push the “Auto Add ~” buttons on
ROS 2 Controllerspage andMoveIt Controllerspage.Select the position command, position state, and velocity state and push the
Add interfacesbutton on theros2_control URDF Modificationspage.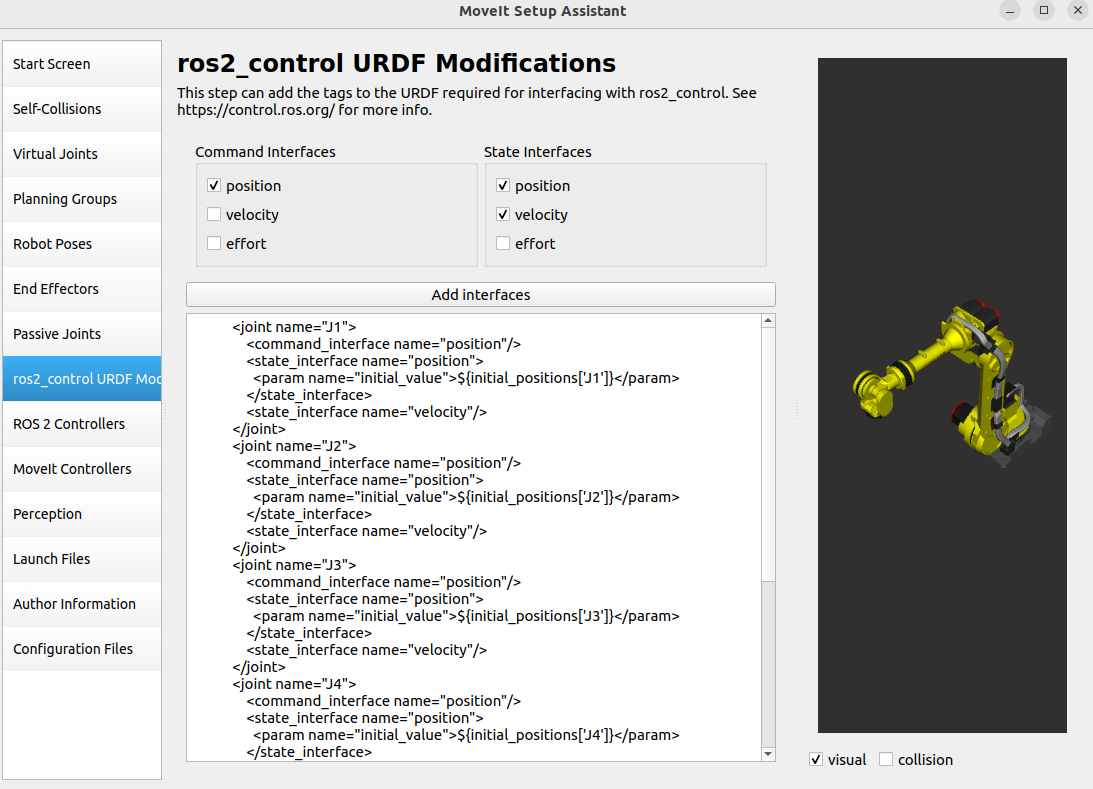
Modifications
The configuration package requires some modifications to move fanuc robots with fanuc_hardware_interface.
Copy
fanuc_moveit_config/config/moveit_controllers.yamlintoyour_moveit_config_package/configdirectory.Copy
fanuc_moveit_config/launch/fanuc_moveit_template.launch.pyintoyour_moveit_config_package/launchdirectory.
Launching
# without physical robot
ros2 launch fanuc_r1000ia_moveit_config fanuc_moveit_template.launch.py robot_model:=r1000ia_100f robot_series:=r1000ia moveit_config:=fanuc_r1000ia_moveit_config use_mock:=true
# with physical robot
ros2 launch fanuc_r1000ia_moveit_config fanuc_moveit_template.launch.py robot_model:=r1000ia_100f robot_series:=r1000ia moveit_config:=fanuc_r1000ia_moveit_config use_mock:=false robot_ip:={your robot's ip address}